В основе современного понимания двигательных действий человека лежит системно-структурный подход, который реализуется в теории структурности движений, сформулированный Н. А. Бернштейном: “Движение не есть цепочка деталей, а структура (в данном случае — система), дифференцирующаяся на детали, — структура целостная, при наличии в то же время высокой дифференциации элементов и разнообразно избирательных форм взаимоотношений между ними”. [1]
Механическое движение является неотъемлемым компонентом функционирования человеческого организма, под которым понимается изменение взаимного положения материальных тел и их отдельных точек относительно друг друга. Каждая сложная форма движения всегда включает в себя более простые формы. Простейшая форма – механическая и она существует везде.
Механическое движение в живых системах проявляется как: передвижение всей биосистемы относительно ее окружения (среды, опоры, физических тел) и деформация самой биосистемы — передвижение ее частей относительно друг друга.
Движения отдельных частей тела объединены в управляемые системы движений, целостные двигательные акты (например, гимнастические упражнения, танец, способы ходьбы). Каждое движение выполняет свою роль в целостном действии, и, следовательно, соответствует цели действия.
Метод биомеханики в наиболее общем виде имеет в своей основе системный анализ и системный синтез действий с использованием количественных характеристик.
Большая часть биомеханических исследований направлена на изучение частных механизмов или общих показателей двигательных актов [11,12].
Исследование движения человека включает в себя регистрацию биомеханических характеристик позвоночника (размеры, пропорции, распределение масс, подвижность межпозвоночных сегментов и др.) а так же движений, как всего позвоночника, так и его сегментов.
Биомеханические характеристики описывают позвоночник человека как объект механического движения. Для системного анализа (установление состава системы движений) эти характеристики позволяют различать отдельные движения. Для определения структуры движений они дают возможность установить изменение одних движений под воздействием других [2, 3].
Количественные характеристики измеряются или вычисляются, и они имеют численные значения и выражают связи одной меры с другой.
Кинематика, как раздел биомеханики, занимается изучением движений тел или их частей с геометрической стороны, независимо от действующих на них сил. Величины, определяющие положение сегмента в неизменяемой среде, определяются их координатами. С помощью последних осуществляется перевод величин физического порядка на язык математических соотношений.
Кинематика дает только внешнюю картину движений, это меры положения и движения человека в пространстве и во времени. Причины же возникновения и изменения движений раскрывает уже динамика.
В решении этих задач широко используются методы моделирования, которые являются особым видом эксперимента, который находится по отношению к изучаемому объекту в структурно-функциональном сходстве и способен замещать его при изучении. Для этого метода требуется соблюдение принципа подобия, который устанавливает границы допустимого замещения моделью прототипа и экстраполяции результатов с модели на прототип.
Моделирование позволяет создать самые различные ситуации и при сравнении их с конкретными клиническими наблюдениями оценить адекватность предлагаемого алгоритма изменения формы и ориентации позвоночника, тем самым раскрыть детали механогенеза деформаций позвоночника при различных его патологических состояниях.
Исследования в этом направлении позволяют лучше изучить изменения в позвоночнике при различных видах его деформации и обосновать преимущества выбираемого вида лечения. Этот метод утвердил себя, благодаря своей точности и отсутствию ограничений, связанных с риском получения осложнений при клинических исследованиях.
Основываясь на этих теоретических положениях, изменение формы и пространственного положения позвоночника при его различных заболеваниях можно рассматривать как форму движения и описывать его, используя законы кинематики. Форма и пространственное положение позвоночника является интегральным показателем действующих сил и является первым шагом на пути изучения механогенеза деформаций позвоночника.
Общеизвестно, что в ответ на нарушение формы и положения позвоночника возникают компенсаторные реакции, направленные на удержание ортостатического положения тела человека при минимизации энергозатрат. Механогенез этих процессов на сегодняшний день изучен недостаточно.
Мы исходим из того, что процесс прогрессирования деформации зависит от многих факторов. Скорость прогрессирования определяется тяжестью деформации, возрастом пациента, величиной внешних усилий, структурой тканей и т. д. Так, например, прогрессирование при наступлении анкилоза двигательного сегмента зависит от пластических свойств костной ткани и от тяжести деформации. При сохранении подвижности в сегментах прогрессирование идет за счет дегенерации межпозвонковых дисков. При врожденной патологии прогрессирование связано с нарушением роста позвонков.
Ответная компенсаторная реакция в пределах физиологических возможностей возникает сразу после появлении первичной деформации, и мы фиксируем уже результат этих двух идущих одновременно процессов. Моделирование позволяет разделить эти два взаимосвязанных процесса во времени.
При создании алгоритмов изменения формы и пространственного положения позвоночника мы постарались учесть большинство факторов, участвующих в этом процессе (вид деформации, ее локализацию и протяженность, последовательность включения различных отделов позвоночника и нижних конечностей в процесс компенсации с целью сохранения ортостатического положения туловища). Дальнейшая работа позволит расширить их ассортимент и тем самым сделать еще один шаг вперед на пути познания законов биомеханики позвоночника.
Параметры и возможности модели.
На основании ранее проведенных нами исследований [4 — 10] была создана базовая параметрическая кинематическая модель, отражающая физиологическую норму формы и пространственной ориентации позвоночника. Параметры ее строения и функциональные возможности сформированы на основе статистически определенных средних значений данных, полученных при обработке спондилограмм 20 волонтеров в возрасте 20-22 года, не имеющих жалоб со стороны позвоночника, прошедших обследование и представлены в таблицах 1-5.
Таблица 1
Параметры тел позвонков в сагиттальной плоскости
| Позвонок | Угол наклона тела позвонка к вертикали | Вертикальный размер тела
позвонка |
| С2 | 21.4° | 66.0 мм |
| СЗ | 2.5° | 23.9 мм |
| С4 | -1.9° | 22.2 мм |
| С5 | -5.3° | 19.9 мм |
| С6 | -6.9° | 21.3 мм |
| С7 | -12.7° | 25.2 мм |
| Th1 | -18.1° | 26.3 мм |
| Th2 | -18.3° | 26.9 мм |
| Th3 | -15.9° | 28.5 мм |
| Th4 | -14.4° | 30.3 мм |
| Th5 | -9.9° | 31.4 мм |
| Th6 | -5.6° | 31.9 мм |
| Th7 | 0.9° | 32.0 мм |
| Th8 | 7.2° | 32.5 мм |
| Th9 | 12.2° | 33.5 мм |
| Th 10 | 14.5° | 36.5 мм |
| Th 11 | 17.0° | 39.2 мм |
| Th12 | 19.4° | 40.3 мм |
| LI | 23.9° | 43.2 мм |
| L2 | 24.1° | 44.9 мм |
| L3 | 17.2° | 48.6 мм |
| L4 | 7.7° | 47.1 мм |
| L5 | -7.5° | 49.0 мм |
| SI | -113.9° | — |
Таблица 2
Параметры межпозвонковых сегментов в сагиттальной плоскости
Диск |
Высота диска |
Угловоесмещение в плоскости диска |
Линейное смещение в плоскости диска | Угол
между телами позвонков |
| C2-C3 | 7.3 мм | 23.8° | -0.6 мм | 19.0° |
| C3-C4 | 7.9 мм | 17.7° | -0.6 мм | -4.4° |
| C4-C5 | 6.90 мм | 14.9° | -1.6 мм | -3.3° |
| C5-C6 | 7.60 мм | 7.2° | -1.4 мм | -1.6° |
| C6-C7 | 7.8 мм | 5.1° | -0.7 мм | -5.7° |
| С7- Th1 | 7.5 мм | 1.1° | 0.0 мм | -5.4° |
| Th1 -Th2 | 6.1 мм | 0.6° | 0.6 мм | -0.2° |
| Th2 — Th3 | 7.3 мм | 4.2° | 0.0 мм | 2.4° |
| Th3 — Th4 | 6.1 мм | 3.6° | 0.2 мм | 1.5° |
| Th4 — Th5 | 5.8 мм | 1.9° | -0.9 мм | 4.6° |
| Th5 — Th6 | 5.0 мм | 3.7° | -0.2 мм | 4.3° |
| Th6 — Th7 | 4.5 мм | 0.9° | -0.7 мм | 6.6° |
| Th7 — Th8 | 5.2 мм | 2.3° | -0.6 мм | 6.3° |
| Th8 — Th9 | 6.1 мм | 3.5° | -0.3 мм | 5.0° |
| Th9-Th10 | 7.1 мм | 2.8° | -0.1 мм | 3.3° |
| Th10 -Th11 | 7.7 мм | 1.8° | -0.6 мм | 2.5° |
| Th11 – Th12 | 8.6 мм | 0.6° | -0.2 мм | 2.4° |
| Th12 — L1 | 9.9 мм | 4.4° | -0.2 мм | 4.4° |
| LI — L2 | 14.6 мм | 4.4° | 0.0 мм | 0.2° |
| L2 — L3 | 16.3 мм | 0.6° | 1.0 мм | -6.9° |
| L3 — L4 | 20.2 мм | 0.4° | 2.1 мм | -9.5° |
| L4 — L5 | 22.9 мм | 9.3° | 3.3 мм | -15.2° |
| L5 — S1 | 20.1 мм | 11.7° | 2.8 мм | -106.4° |
Таблица 3
Параметры отделов позвоночника в сагиттальной плоскости
Отдел позвоночника |
Центральный
угол дуги в сагиттальной плоскости |
Угол наклона
хорды дуги в сагиттальной плоскости |
|
| Шейный | С2-С7 | -33° | -2° |
| Верхне- грудной | Th1- Th5 | 9° | 15° |
| Средне-грудной | Th5- Th9 | 25° | -1.0° |
| Нижне-грудной | Th9-Th12 | 8° | -15° |
| Грудной | Th1-Th12 |
60° | -0.5° |
| Поясничный | L1-L5 | -36° | -13.5° |
| Наклон туловища | Th1-L5 | — | -6.0° |
Модель включает нижние конечности, поскольку их параметры (таблица 4) играют существенное роль в механизме сохранения ортостатического положения тела человека.
Таблица 4
Параметры нижней конечности
| Сегмент конечности | Длина |
| Бедро | 500 мм |
| Голень | 450 мм |
| Передний отдел стопы | 180 мм |
| Задний отдел стопы | 40 мм |
Таблица 5
Функциональные возможности двигательных сегментов позвоночника
и сочленений нижних конечностей в сагиттальной плоскости
Сегмент |
Сгибание
на угол |
Разгибаниена угол |
| C2-C3 | 8° | 8° |
| C3-C4 | 10° | 10° |
| C4-C5 | 10° | 10° |
| C5-C6 | 10° | 10° |
| C6-C7 | 14° | 14° |
| С7- Th1 | 12° | 12° |
| Th1 -Th2 | 2.5° | 2.5° |
| Th2 — Th3 | 2.5° | 2.5° |
| Th3 — Th4 | 2.5° | 2.5° |
| Th4 — Th5 | 2.5° | 2.5° |
| Th5 — Th6 | 2.5° | 2.5° |
| Th6 — Th7 | 4° | 4° |
| Th7 — Th8 | 4° | 4° |
| Th8 — Th9 | 4° | 4° |
| Th9-Th10 | 6° | 6° |
| Th10-Th11 | 8° | 8° |
| Th11 – Th12 | 8° | 8° |
| Th12-L1 | 8° | 8° |
| LI -L2 | 10° | 10° |
| L2-L3 | 10° | 10° |
| L3-L4 | 12° | 12° |
| L4-L5 | 12° | 12° |
| L5-S1 | 12° | 12° |
Тазобедренный сустав |
90° | 30° |
| Коленный сустав | 150° | 0° |
| Голеностопный сустав | 90° | 30° |
С целью создания различных функциональных возможностей и патологических состояний позвоночника в модели предусмотрено произвольное изменение этих параметров, а так же изменение последовательности включения отделов позвоночника и суставов нижних конечностей при совершении сгибания и разгибания в зависимости от поставленной задачи.
После завершения движений в каждом из отделов позвоночника формируемое графическое изображение, что позволяет оценивать момент включения суставов нижних конечностей для сохранения ортостатического баланса туловища.
Аналогичные параметры модели позвоночника разработаны и для фронтальной плоскости.
Вывод информации осуществляется в графическом и табличном виде с цветовым выделением параметров, выходящих за пределы физиологической нормы. Предусмотрена возможность изменения масштаба и положения рисунка на экране для более детального рассмотрения интересующего фрагмента. Рис. 1.
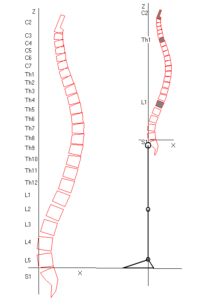
Рис.1. Базовая кинематическая модель человека. Фрагменты экрана.
Основным критерием сохранения ортостатического положения тела является сохранение проекции центра массы (ОЦМ) тела в границах площади опоры.
Вторым критерием достижения вертикального баланса тела человека нами принята нормализация ориентации тела С2 позвонка как критерия положения линии взора, являющегося важным фактором комфортной адаптации человека в пространстве и коммуникации. Этот параметр имеет наибольшее значение при создании патологических ситуаций в шейном отделе позвоночника.
В ряде случаев для нормализации взора предусмотрено сгибание в коленных суставах (поза просителя при болезни Бехтерева)
Пусковым моментом для включения механизма компенсаторных реакций служит нарушение угла наклона тела позвонков выше уровня моделируемой патологии. Нормализации этих параметров является дополнительным критерием достаточности компенсаторного ответа.
В модели предусмотрены возможности создание первичной деформации позвоночника, которое осуществлялось за счет изменения четырех параметров Рис. 2.
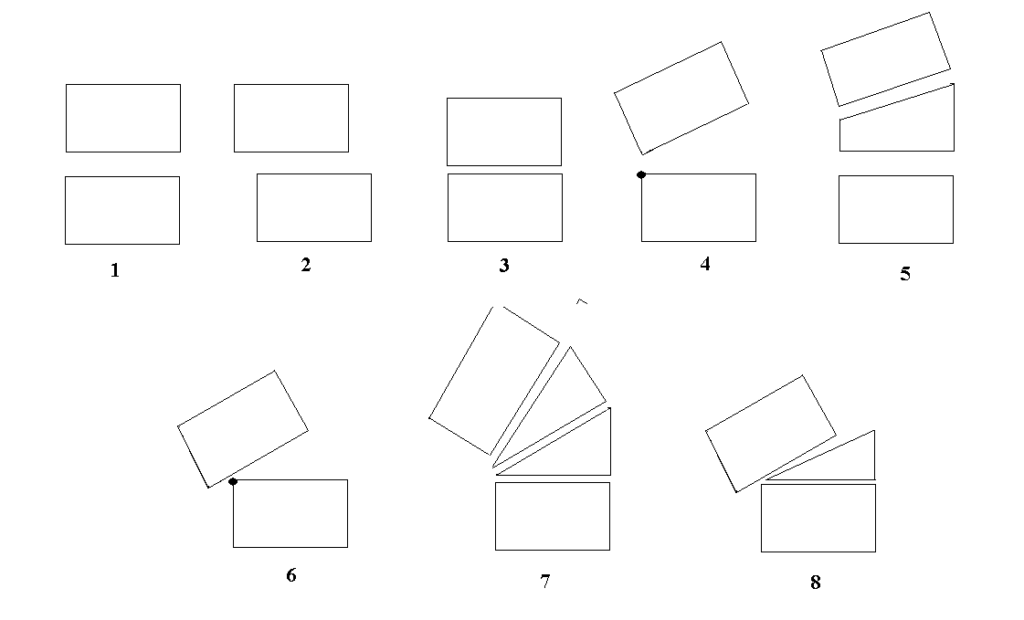
Рис.2. Варианты моделирования первичной деформации позвоночника.
- Норма
- Изолированное смещение в плоскости диска
- Изолированное снижение высоты диска
- Изолированное угловое смещение позвонка
- Изолированная клиновидность тела позвонка
- 7. 8 Варианты сочетания изолированных смещений.
Сочетание всех вышеперечисленных параметров как на одном, так и на нескольких уровнях дает неограниченные возможности для моделирования различных видов первичной деформации позвоночника известных патологических нозологий. При этом придание отрицательного значения высоты межтелового промежутка возможно только при наличии вентрального смещения тела позвонка более 2 мм.
Вентральное перемещение тела позвонка в изолированном виде или при и возникновении кифотической деформации приводит к изменению положения части тела, расположенной выше уровня возникшей деформации, а, следовательно, и к изменению положения общего центра массы. (ОЦМ). Рис 3.
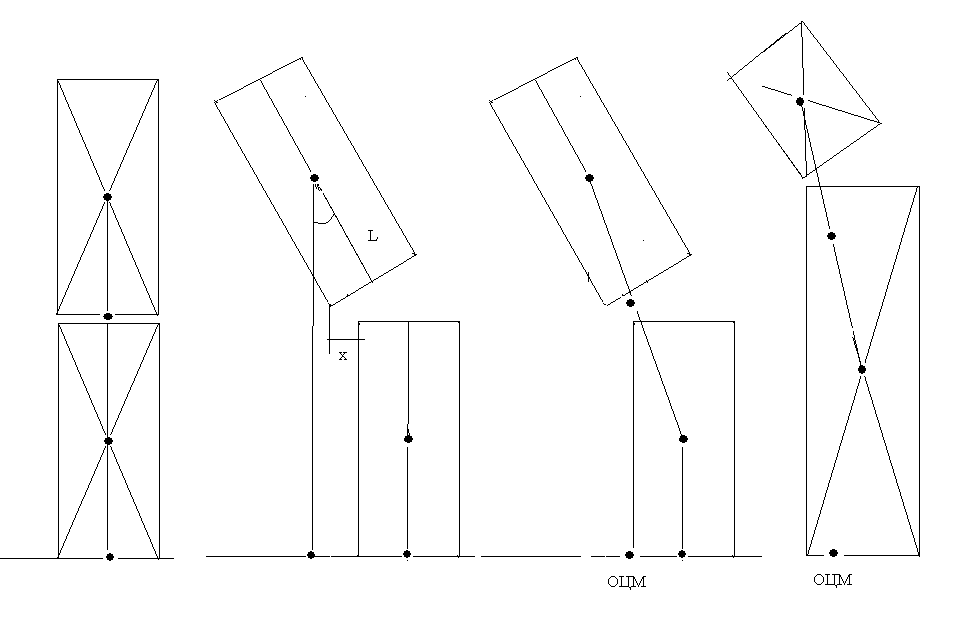
Рис. 3. Схема расчета положения ОЦМ в зависимости от вида и уровня расположения первичной деформации позвоночника.
Задача определения ОЦМ – зависит от достаточно большого числа индивидуальных параметров. Наиболее значимой величиной является смещение ОЦМ в переднезаднем направлении при изменении угла наклона хорды дуги, расположенной выше уровня патологии. Очевидно, эта величина определяется по формуле:
![]() ,
,
где:
∆ – перемещение ОЦМ при возникновении первичной деформации позвоночника;
L – длина хорды дуги расположенной выше уровня патологии;
α – угол наклона хорды дуги расположенной выше уровня патологии;
Dх – горизонтальное перемещение тела позвонка.
В ответ на возникшую первичную деформацию в соответствии с разработанными алгоритмами реализуются компенсаторные реакции в виде разгибания в сегментах позвоночника и суставов нижних конечностей с целью нормализации положения проекции ОЦМ. Рис. 4.
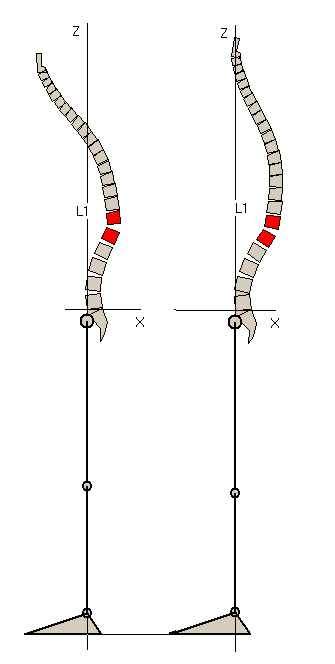
Рис. 4. Моделирование кифотической деформации величиной 24° на уровне Th12-L1 сегмента и последующей ее компенсации.
Эти компенсаторные реакции можно разделить на физиологические (в пределах функциональных возможностей двигательных сегментов позвоночника) и патологические в виде гиперэкстензии двигательных сегментов позвоночника и подключения суставов нижних конечностей.
Помимо этого в модели предусмотрены варианты внешнего воздействия в виде дистракции отрезка позвоночника, редукции позвонка и коррекции угловой деформации с целью получения и оценки результатов планируемых, корригирующих пособий и ответных компенсаторных реакций со стороны двигательных сегментов позвоночника и сочленений нижних конечностей.
Математический аппарат модели
В качестве системы отсчета принята прямоугольная система координат, в которой изменение угловых величин 1-ой и 4-ой четвертей имеют отрицательное, а во 2-ой и 3-ей четвертях – положительное значение. Начало системы координат локализуется в каудо-вентральной точке тела L5 позвонка. Сагиттальная плоскость XZ, а фронтальная YZ.
Позвонки представлены в виде четырехугольников, построенных по координатам крайних точек, и последовательно соединенных между собой.
Определение координат позвонков выше уровня патологии – задача, сводящаяся к повороту радиус-вектора на угол a и горизонтальному и вертикальному перемещению на Dх и Dy:
здесь (x,y) – старые координаты точки; (x’,y’) – новые координаты; a – угол угол наклона хорды дуги расположенной выше уровня патологии; Dх и Dy – горизонтальное и вертикальное перемещение тела позвонка.
Так же вычисляемые параметры модели – центры и радиусы окружностей аппроксимирующих различные сегменты позвоночника. По известным координатам позвонков (xi, yi) эти параметры определялись методом наименьших квадратов.
Из общего уравнения окружности:
![]()
радиус окружности:  , центр окружности:
, центр окружности:
 Т. е. задача определения параметров окружности сводится к определению значений A, B, C.
Т. е. задача определения параметров окружности сводится к определению значений A, B, C.
Расстояние от центра окружности (X0,Y0) до произвольной точки (xi, yi):
![]() .
.
Выберем критерий оптимальности аппроксимационной дуги в следующем виде:
 .
.
или
![]()
Используя необходимые условия существования экстремума, для определения параметров A, B, C получаем нормальную систему линейных алгебраических уравнений:
В матричном виде её можно записать как
![]() ,
,
где
Тогда её решение можно найти из соотношения:
![]() .
.
Данный алгоритм реализован в интегрированной среде программирования Delphi в виде комплекса программ для ПЭВМ, работающих под управлением ОС Windows *.
Область использования прогностической модели
Основное предназначение разработанной модели – использование ее в качестве инструмента при проведении научных исследований. Помимо этого, при отсутствии большого опыта в области вертебрологии, модель поможет составить прогноз течения деформации, решить ряд вопросов при планировании коррекции деформации, прогнозировать исходы лечения и провести экспертную оценку его результатов. При неполных рентгенологических данных, включающих только очаг поражения позвоночника, с помощью данной модели возможно восстановление общей картины формы и пространственной ориентации всего позвоночника, что снижает лучевую нагрузку на пациента.
В последующих публикациях мы предложим читателям доказательства адекватности разработанной модели.
Гладков А.В., Коммисаров В. В.
Литература.
- Бернштейн Н.А. Избранные труды по биомеханике и кибернетике: Учеб. пособие для высш. и сред. спец. учеб. заведений.- М.: СпортАкадемПресс, 2001.-295с.
- Донской Д.Д., Зациорский В. М. Биомеханика: Учебник для ин-тов физ. культ.- М.: Физкультура и спорт, 1979.-264с.
- Донской Д.Д. Биомеханика: Учебное пособие для студентов факультета физического воспитания педагогических институтов.- М.: Просвещение, 1975.-239с.
- Гладков А. В. Биомеханическая классификация флексионных деформаций при болезни Бехтерева. Патология позвоночника. Санкт-Петербург, стр. 93-99
- Гладков А. В. , Коржавин Г.М. Биомеханическая оценка деформаций при болезни Шойерман-Мау. Патология позвоночника. Санкт-Петербург, 1992. стр. 84-94
- Гладков А. В. Пронских И.В. Геометрия позвоночного столба. Актуальные вопросы вертебрологии Л.- 1988 стр.114—116
- Гладков А. В. Ханаев А. Л. Механогенез врожденных кифозов грудо-поясничной локализации.VII съезд травматологов-ортопедов России. Тезисы докладов. Том 1 Новосибирск 2002 стр.172-173
- Гладков А. В., Рерих В.В. Клинико-биомеханическая оценка позвоночника при истинном спондилолистезе L4 позвонка. VII съезд травматологов-ортопедов России. Тезисы докладов. Том 1 Новосибирск, 2002. стр.193
- Гладков А. В. Рерих В.В. Биомеханичечкая оценка позвоночника при истинном спондилолистезе L5 позвонка. VII съезд травматологов-ортопедов России. Тезисы докладов. Том 1 Новосибирск, 2002 стр. 191-192
- Гладков А. В., Симонович А.Е. Особенности биомеханических нарушений при поясничном остеохондрозе. VII съезд травматологов-ортопедов России. Тезисы докладов. Том 1 Новосибирск, 2002. стр. 193-194
- Пушкин В.Г., Урсул А.Д. Системное мышление и управление.- М.: Наука, 1994.-201с.
- Уемов А.И. Системный подход и общая теория систем.- М.: Мир, 1988.-198с.